
Path planning algorithms are used to find a safe and efficient route from a starting point to a destination while avoiding obstacles. They are a core part of robotics, autonomous vehicles, warehouse automation, game AI, and drone navigation. In simple terms, a path planning system answers one question: how can an agent move from point A to point B without collisions?
This topic is important because modern intelligent systems operate in dynamic and often crowded environments. A delivery robot in a warehouse, for example, must not only reach the correct shelf but also avoid racks, workers, and other moving robots. Understanding path planning helps learners connect mathematics, algorithms, and real-world automation systems. For students exploring practical AI applications through an ai course in mumbai, path planning offers a strong example of how theory is applied to physical movement and decision-making.
What Path Planning Means in Practice
Path planning is not only about drawing a line between two points. The route must satisfy constraints such as safety, distance, time, energy use, and turning limits. In many real systems, the path must also be smooth enough for the machine to follow.
Key Elements of a Path Planning Problem
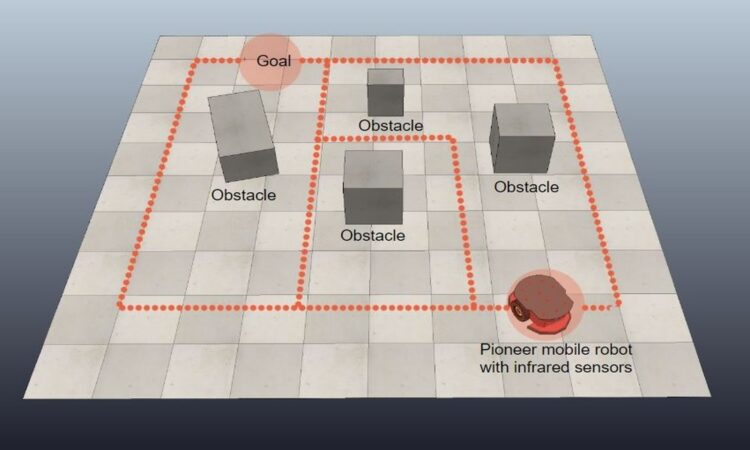
A path planning problem usually includes the following parts:
- Start position: The current location of the robot or agent.
- Goal position: The target location to reach.
- Environment map: A representation of free space and obstacles.
- Constraints: Rules such as maximum speed, turning radius, or restricted zones.
- Cost function: A measure used to compare routes, such as shortest distance or minimum time.
A path is considered collision-free only if every point on the route stays within free space. In grid-based systems, this means the selected cells are not blocked. In continuous environments, the algorithm checks whether the robot shape intersects any obstacle.
Common Path Planning Algorithms
Different algorithms are used depending on the environment, speed requirements, and level of accuracy needed. Some are better for static maps, while others perform better in changing surroundings.
1. Dijkstra’s Algorithm
Dijkstra’s algorithm finds the shortest path from a start node to all other nodes in a weighted graph. It guarantees the optimal path if all edge weights are non-negative.
Where it works well:
- Known environments
- Grid maps and road networks
- Situations where optimality is important
Limitation:
It explores many nodes, which can make it slow in large maps.
2. A* Algorithm
A* is one of the most widely used path planning algorithms. It improves on Dijkstra by using a heuristic estimate to guide the search toward the goal. This often reduces the number of nodes explored.
Why is it popular:
- Fast and efficient in many practical cases
- Can still produce an optimal path if the heuristic is admissible
- Easy to implement on grid maps
For example, a warehouse robot navigating between aisles can use A* with the Manhattan distance heuristic to quickly find a route.
3. Rapidly-Exploring Random Trees (RRT)
RRT is useful in high-dimensional spaces, such as those encountered in robotic arms with multiple joints. Instead of searching every possible state, it randomly samples the space and grows a tree toward unexplored regions.
Strengths:
- Useful for complex motion planning
- Works in continuous spaces
- Handles non-linear constraints better than simple grid search methods
Limitation:
The path may not be optimal and often needs smoothing.
4. Probabilistic Roadmaps (PRM)
PRM is commonly used when the same environment is reused many times. It creates a roadmap of valid points in free space and connects them. Later, start and goal points are attached to this roadmap for fast queries.
Best use case:
- Static environments
- Repeated path requests
- Industrial robots in fixed layouts
Challenges in Real-World Path Planning
Real environments are rarely perfect. A path-planning algorithm that works well in simulation may struggle in real conditions.
Static vs Dynamic Obstacles
In static environments, obstacle positions do not change. In dynamic environments, humans, vehicles, or other robots move unpredictably. This requires replanning or real-time updates.
Map Accuracy and Sensor Noise
Path planning depends on the quality of the map. If sensors provide noisy or incomplete data, the planner may choose an unsafe route. This is why path planning is often combined with localisation and perception systems.
Trade-off Between Speed and Optimality
A highly optimal path may take longer to compute. In some applications, a good path found quickly is better than the best path found too late. Autonomous systems often prioritise response time, especially in safety-critical situations.
These trade-offs are central to robotics and autonomous navigation topics covered in advanced learning pathways, including an ai course in mumbai, where students study both algorithm design and implementation constraints.
Applications of Path Planning Algorithms
Path planning is used across industries because many systems need safe movement decisions.
Robotics and Automation
Mobile robots in factories and warehouses use path planning to transport goods while avoiding collisions. This improves productivity and reduces manual effort.
Self-Driving Vehicles
Autonomous cars use path planning to select lanes, avoid obstacles, and move toward a destination. The route must account for road rules, other vehicles, and changing traffic conditions.
Drones and Aerial Navigation
Drones use path planning to avoid buildings, trees, and restricted zones. In delivery and inspection tasks, efficient routing also helps conserve battery life.
Video Games and Simulations
Game characters use path planning to move realistically across maps. A* is especially common in games because it balances speed and path quality.
Conclusion
Path planning algorithms are essential for finding collision-free routes in intelligent systems. They convert maps, constraints, and goals into practical movement decisions. From Dijkstra’s and A*’s to RRT and PRM, each method serves different needs based on the environment’s complexity and performance requirements.
A clear understanding of path planning helps build stronger foundations in robotics and AI. As automation grows across industries, the ability to design safe and efficient navigation logic will remain a valuable skill for both engineers and learners.




{kind=link}